一、所属领域
无人系统领域
二、技术或产品名称
无人机吊挂系统摆角检测与抑制
三、技术水平
国内先进水平
四、技术简介
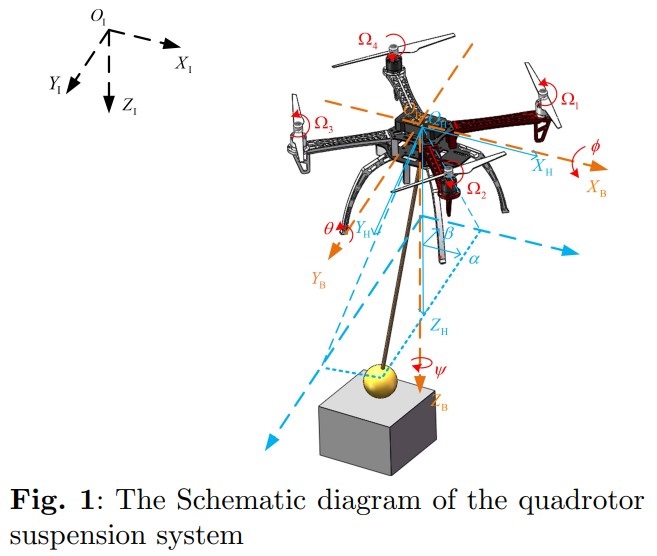
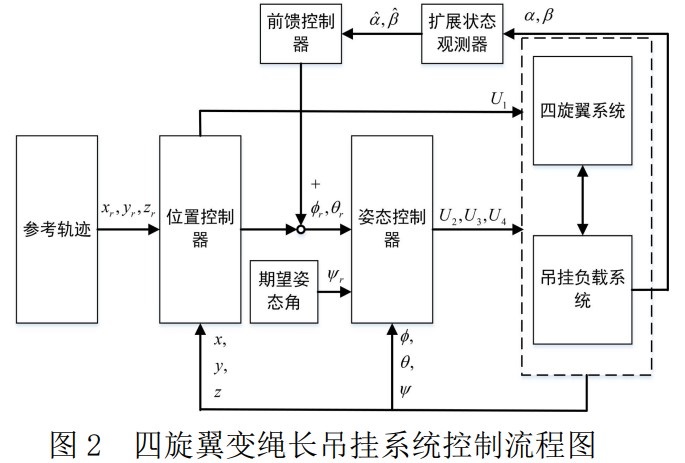
针对四旋翼无人机吊挂负载飞行过程中负载的摆动问题,提出一种视觉摆角检测方案和减摆控制方案。设计视觉摆角检测方案,将双目相机固定于无人机底座,利用双目相机对负载上的标识物进行识别与定位,根据建立的无人机吊挂系统的数学模型,再考虑到相机的姿态随无人机机体姿态变化一致等因素,建立负载摆角模型。进一步建立基于无人机吊挂系统数学模型基础上的负载摆角观测器,该观测器可用于部分替代双目相机的功能,以期减轻无人机机身重量。负载摆角检测方案实时测量摆角值,与减摆路径规划模块形成闭环反馈结构。由于反馈结构的存在,该方案可根据当前摆角状态实时更新从当前位置到目标点的路径,规划出的路径既能满足摆角的约束条件,又能以最少时间到达目标位置。或者从前馈控制器补偿给定姿态参考值角度,设计一种复合控制方案以抑制负载摆动。
五、创新点及性能指标
创新点:设计视觉摆角检测方案,利用双目相机对负载上的标识物进行识别与定位;进一步建立基于无人机吊挂系统数学模型基础上的负载摆角观测器,该观测器可用于部分替代双目相机的功能;将摆角检测技术与无人机路径规划技术相结合,实现无人机携带负载小摆动的运输和精准投放。
性能指标:仿真和实验表明,视觉摆角检测方案能够准确有效地测量四旋翼吊挂系统的摆角,采用前馈控制器的防摆控制方案能够有效地抑制有效载荷的摆动;仿真结果表明,减摆路径规划方案可以实现四旋翼飞行器稳定可靠的飞行,并将有效载荷摆角限制在所需范围内,以减少有效载荷的摆动。
六、知识产权情况
CN202111385656.6+一种多旋翼吊挂系统的视觉摆角检测与减摆方法
CN112817328B+一种四旋翼变绳长吊挂系统的路径规划与减摆控制方法
CN115686038A+一种四旋翼吊挂系统的摆角观测与减摆控制系统及方法
七、合作方式
联合开发落地
八、投资概算及经济效益分析
投资概算:
经济效益分析:所提出的摆角检测和减摆控制相结合的解决方案,在仿真和实验中很好地展现了有效载荷的平稳运输。极大地拓宽了负载的种类,为易损坏、不规则、易晃动的货物运输提供安全保障,具有很好的应用价值。
九、负责人
负责人姓名:张栋
十、技术或产品的关键词
四旋翼无人机吊挂系统,视觉摆角检测,负载摆角观测器,减摆路径规划
十一、技术或产品介绍图片