成果简介:
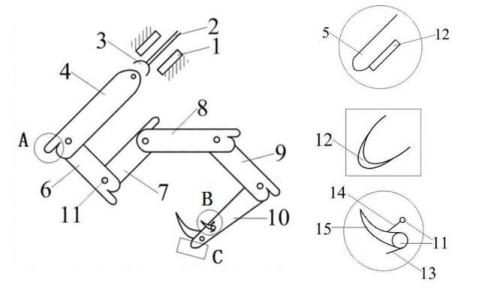
本成果涉及一种具有缓冲功能的仿生机器人,包括动力源连接装置、若干依次连接的仿生肢节及设置于末端仿生肢节上的钩爪,相邻的仿生肢节之间通过连接件活动连接,且其间设置有转角限位结构及缓冲结构,使得钩爪在一定角度范围内可自由调节。
技术特点及技术指标:
本发明技术具有以下特点:结构简单,能够折叠,空间利用率高;结构路况适应性强;具有攀爬能力,功能性强;能够有效缓冲部件间的刚性冲击,且整体具有一定的抗冲击能力。
应用领域:
本成果应用于某些空间受限、路况比较极端的工作环境,其工作内容包括但不局限于搭建缓冲装置、搬运货物、勘探、搜救等。
投入需求:
成果产业化应用先期需投入资金约 20 万元,用以批量生产机器人,搭建机器人运动控制平台, 完善各项生产设施。
专利授权及申请情况:
1、国家发明专利:具有缓冲功能的仿生海蟑螂腿结构(授权)
2、国家发明专利:一种环节动物的仿生减震机构(授权)
成果受资助及获奖情况:
山东省自然科学基金重点项目,ZR202011050038,微型机器人在磁场加载下的结 构变形、运动调控与装置研发,2021-01 至 2022-12。
技术成熟程度: ☑形成样机、样品或软件
拟合作方式:☑技术许可